BJT DC analysis finds a BJT’s operating point (the DC values , , , ) with no signal applied. You almost always assume active mode, solve, then check the assumption. If it fails the device is in saturation and you redo it.
The recipe
- Assume active mode. This lets you use and (the BJT large-signal model).
- Set (constant-voltage-drop EBJ).
- KVL around the input (base–emitter) loop to find , or for a divider bias find the base voltage from the divider.
- Compute the currents: and . (Equivalently , with .)
- KVL around the output (collector–emitter) loop to find .
- Check the assumption. If (npn), the CBJ really is reverse-biased: active mode confirmed, the answer stands. If (or comes out negative), active mode is impossible and the device is in saturation. Redo with as known and let fall out of the external circuit; no longer holds.
Four-resistor (voltage-divider) topology
The standard discrete bias. and form a divider from to ground setting the base voltage ; runs collector to ; runs emitter to ground. The fast path:
- from the divider (assuming the divider current ≫ so base loading is negligible).
- .
- .
- (since ).
- .
- Check to confirm active mode.
Insensitive to variation precisely because the bias current is set by resistors (), not by . See Voltage-divider bias.
 , base driven directly at , , , . Active gives , , , active confirmed.
, base driven directly at , , , . Active gives , , , active confirmed.
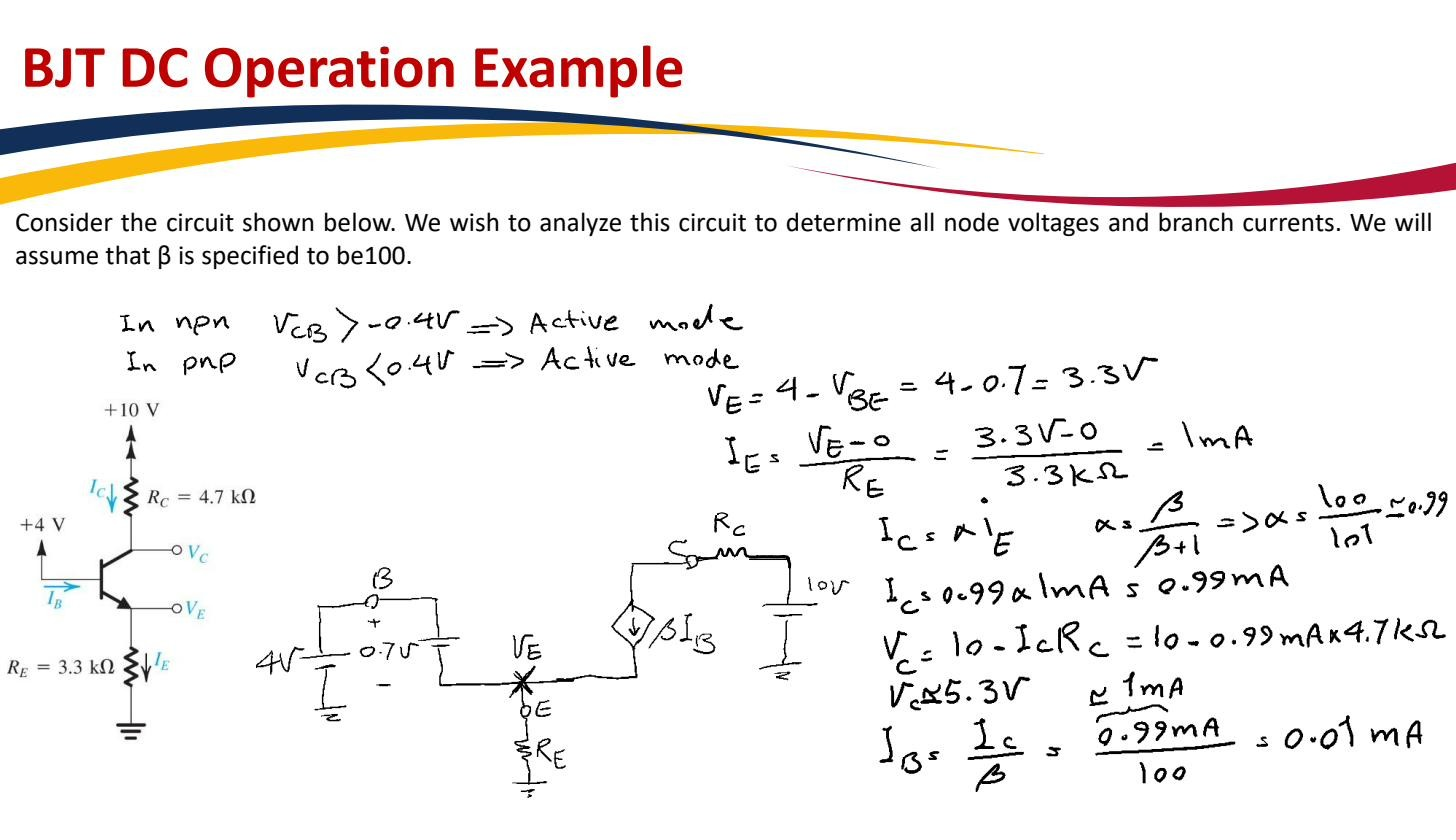
Worked example 1 — active mode confirmed
; the base is driven directly from a source; from collector to ; from emitter to ground; .
- Assume active, . Emitter voltage: .
- Emitter current: .
- ; base current .
- Collector voltage: .
- Check: (equivalently ). Active mode confirmed; the operating point is valid.
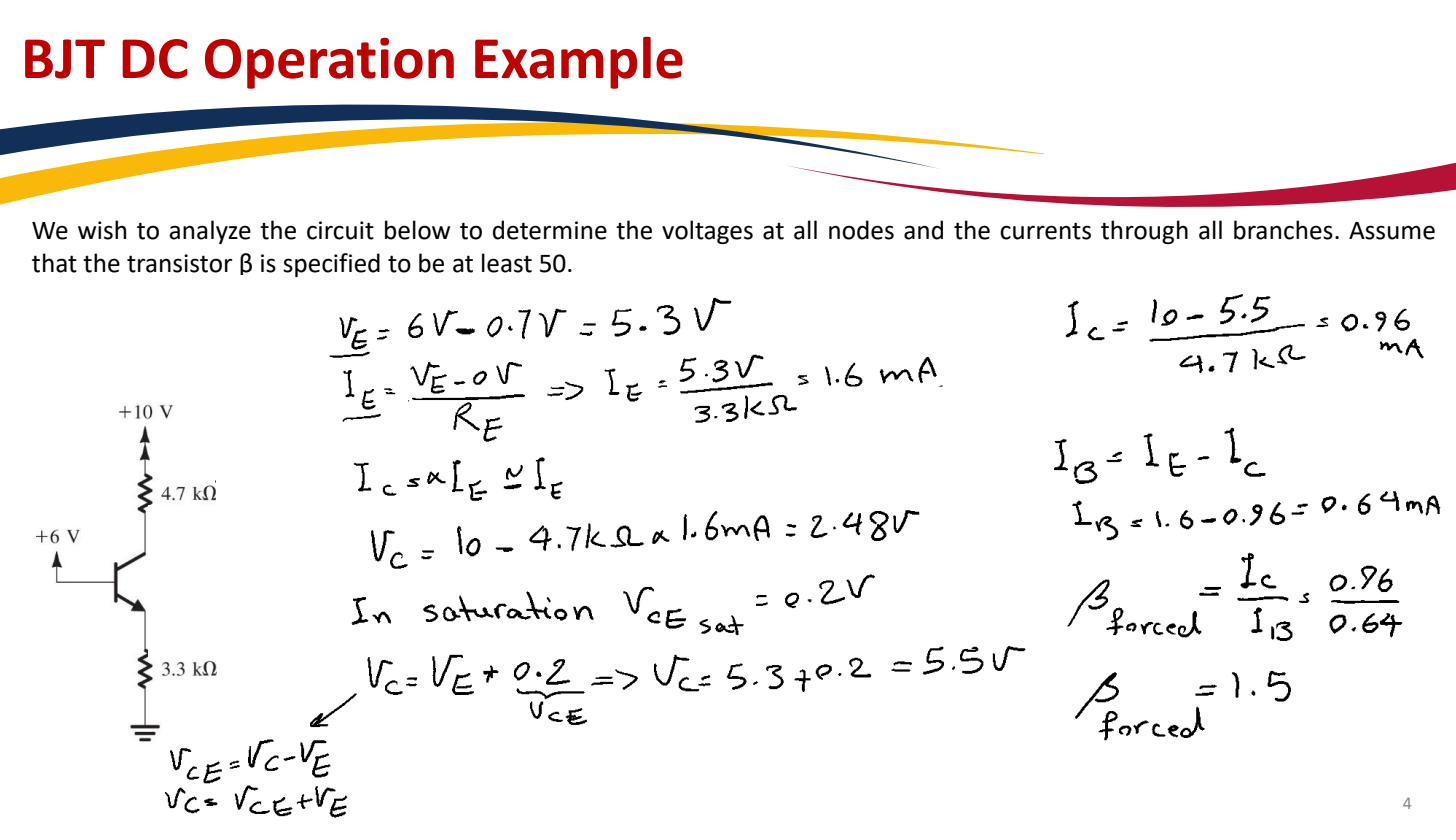
Worked example 2 — active assumption FAILS (saturation)
Same circuit but the base source is now (, , , ).
- Assume active: , so , .
- Predicted .
- Check fails: is below , so , impossible. The active assumption is wrong; the device is in saturation.
- Redo in saturation: use . The base is still pinned at with , so stays at and . From : , so , set entirely by the external collector loop (not by ). The base current then falls out of KCL: . Hence , far below the device . That gap is the signature of hard saturation: the base is being driven harder than the collector circuit can absorb, so pins at the external limit and the excess base drive shows up as .
 The case predicts , so the active assumption fails; redo with , giving .
The case predicts , so the active assumption fails; redo with , giving .
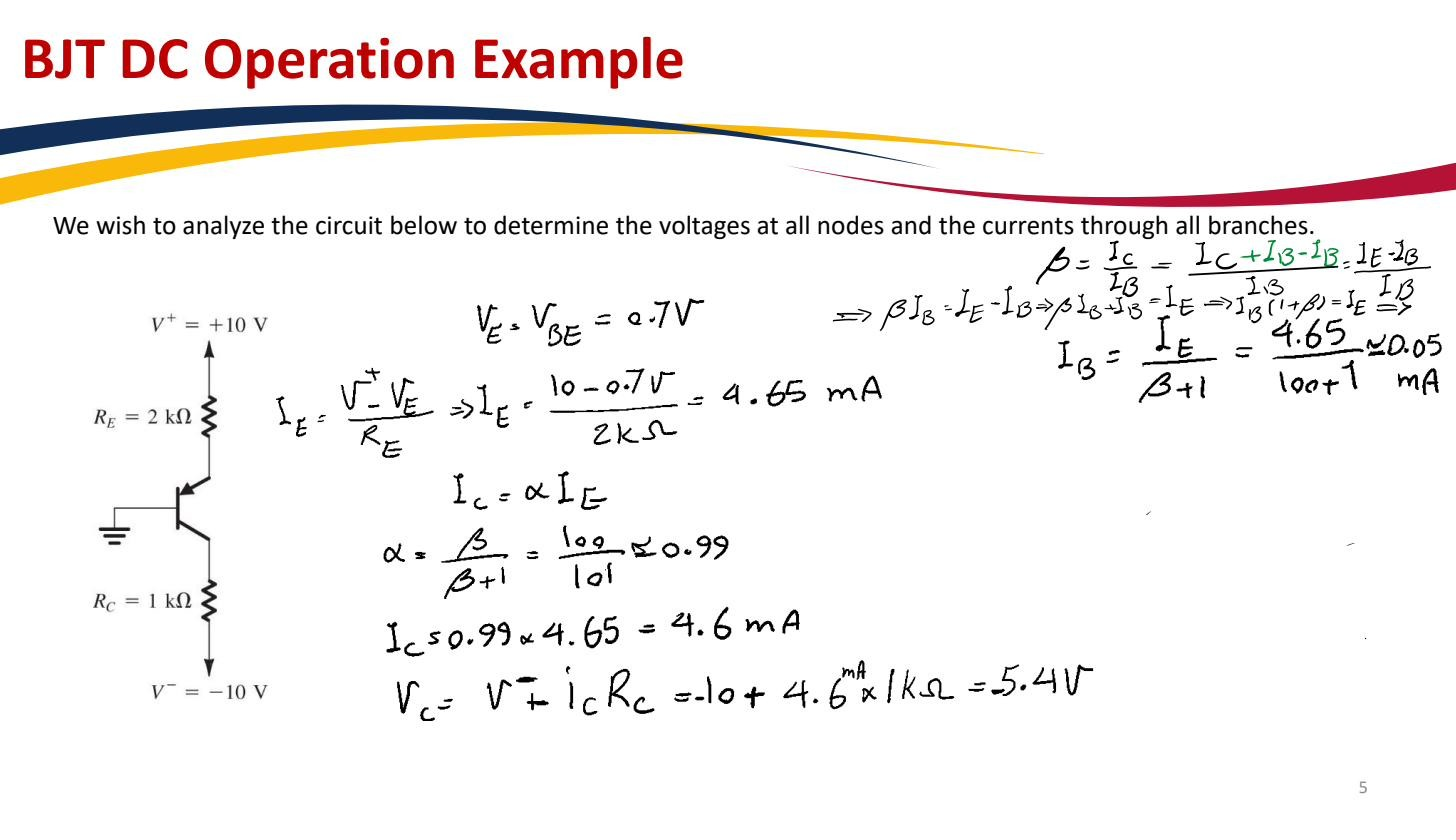
Worked example 3 — pnp on dual supplies
A pnp biased between and ; from the emitter to the rail; from the collector to the rail; base referenced to ground; .
For a pnp the EBJ is forward-biased with the emitter positive relative to the base, so . With the base at ground, the emitter sits at .
- Emitter current (out of the rail through ): .
- (flowing out of the collector for a pnp).
- Collector voltage: .
- Check: for a pnp, active mode needs the CBJ reverse-biased. Here is well below , so . Active mode verified.
 pnp on ±10 V, , , : , , , , active verified.
pnp on ±10 V, , , : , , , , active verified.
Good bias topologies (Voltage-divider bias, dual-supply, Emitter degeneration) make the operating point depend on resistor ratios and supply voltages, not on the poorly-controlled .