For a 2D linear autonomous system , the phase portrait (qualitative picture of trajectories in the -plane) is set by the eigenvalues of . Six standard cases cover everything, each with its own shape and stability.
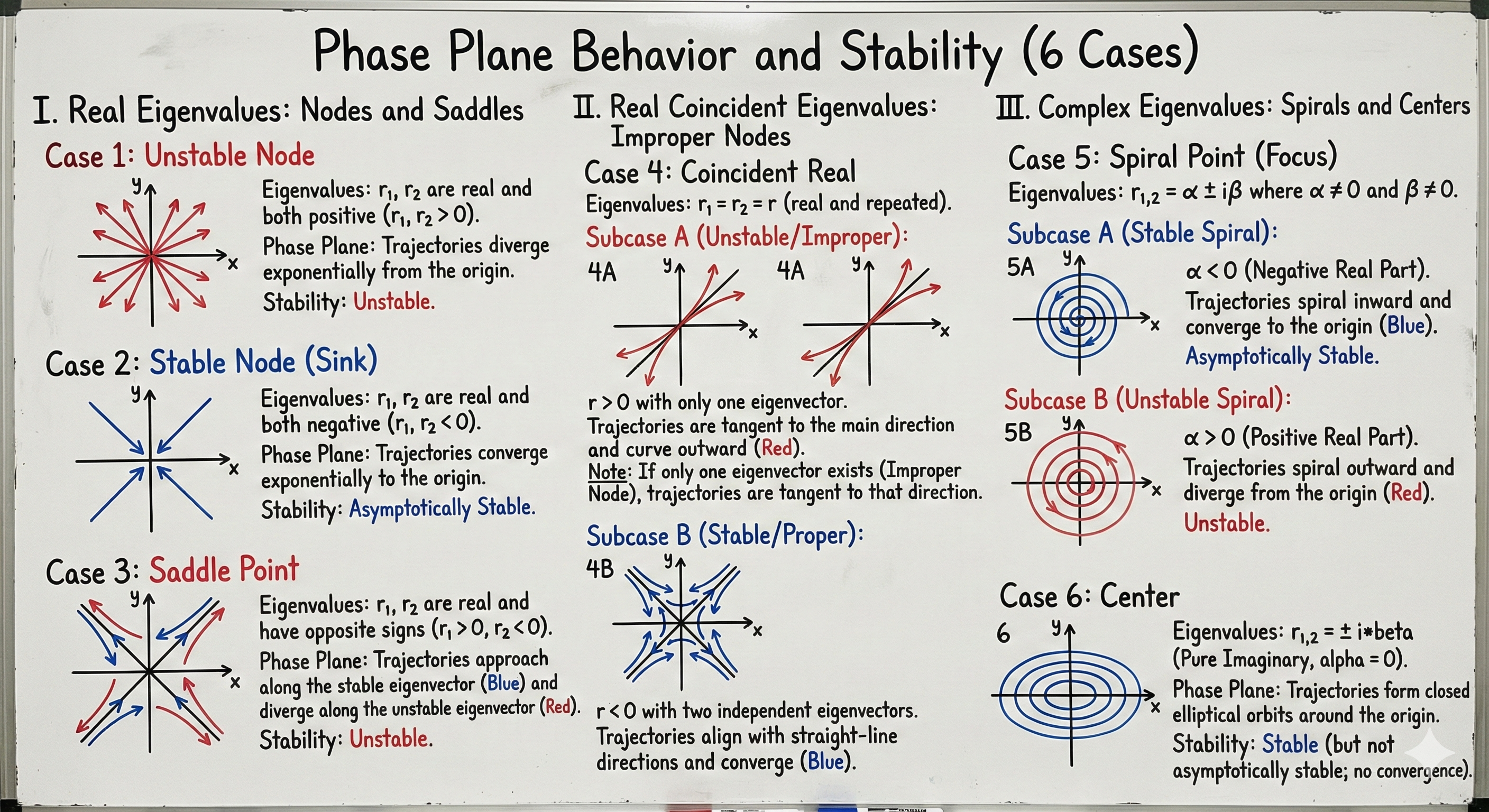 All six cases on a single whiteboard: Case 1 unstable node, Case 2 stable node (sink), Case 3 saddle, Case 4 repeated-eigenvalue nodes (proper/improper), Case 5 spirals, Case 6 center.
All six cases on a single whiteboard: Case 1 unstable node, Case 2 stable node (sink), Case 3 saddle, Case 4 repeated-eigenvalue nodes (proper/improper), Case 5 spirals, Case 6 center.
Stability terminology
Quick recap (formal definitions in Stability of autonomous systems):
- Stable: nearby trajectories stay nearby for all time.
- Asymptotically stable: nearby trajectories converge to the equilibrium.
- Unstable: at least some nearby trajectories move away.
Phase portrait classifications:
- Node: trajectories approach (or leave) along straight-line directions.
- Saddle: trajectories approach along one direction, depart along another.
- Spiral (focus): trajectories spiral in or out.
- Center: trajectories form closed orbits.
Case 1: distinct real eigenvalues, both positive ()
Both eigenvalues positive real. Solutions grow exponentially in both eigenvector directions.
- Type: unstable node. (Some introductory texts call this an “improper node,” but in standard dynamical-systems terminology “improper” denotes the defective repeated-eigenvalue case in Case 4b below; with two distinct eigenvalues this is just a node.)
- Behavior: trajectories diverge exponentially from the origin.
- Equilibrium stability: unstable.
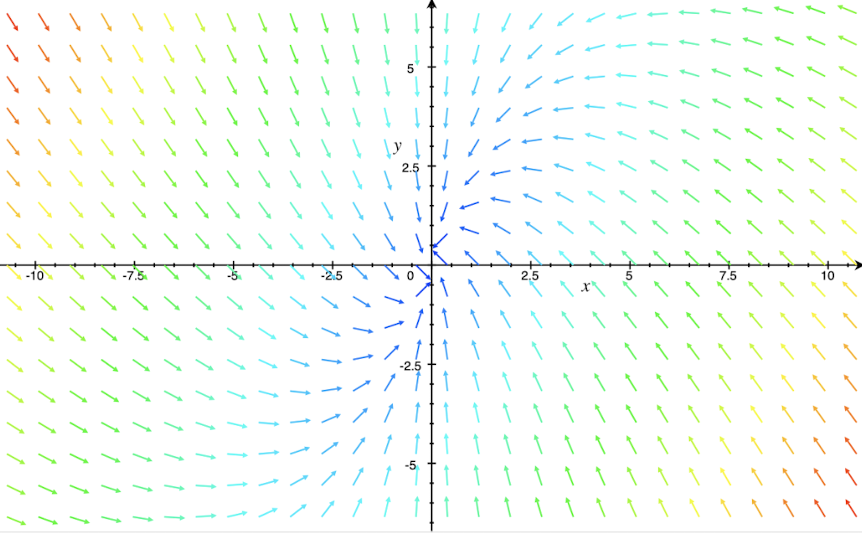
Case 2: distinct real eigenvalues, both negative ()
Both eigenvalues negative real. Mirror of Case 1: trajectories shrink toward origin.
- Type: stable node (sink).
- Behavior: trajectories converge exponentially to origin.
- Equilibrium stability: asymptotically stable.
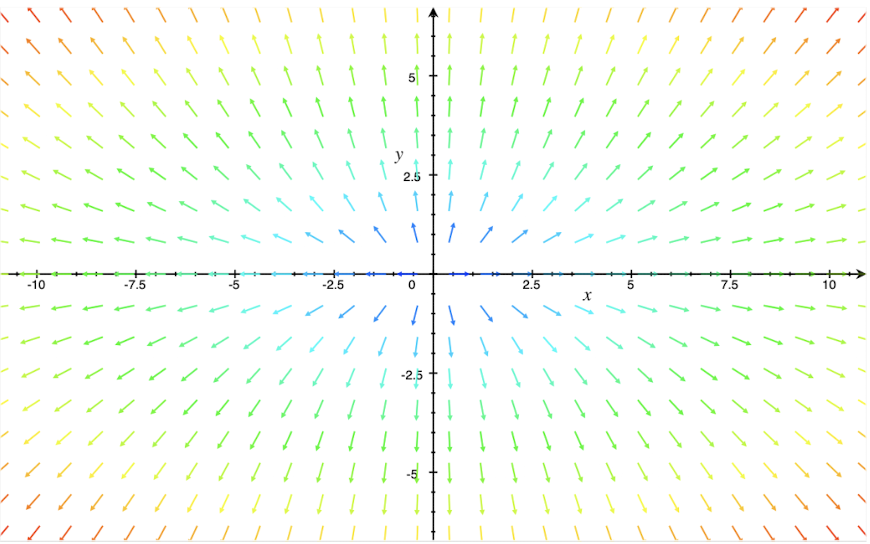
Case 3: distinct real eigenvalues, opposite signs ()
One positive, one negative. Solutions grow in one direction, shrink in another.
- Type: saddle point.
- Behavior: trajectories approach origin along the eigenvector for the negative eigenvalue, then diverge along the positive eigenvalue’s direction.
- Equilibrium stability: unstable.
Case 4: repeated real eigenvalues ()
Two subcases depending on number of eigenvectors:
Case 4a: two linearly independent eigenvectors (proper node)
Every direction is an eigenvector: the matrix is a scalar multiple of identity. Trajectories are straight lines through origin.
- : unstable proper node.
- : stable proper node (asymptotically stable).
Case 4b: only one eigenvector (improper node)
Defective matrix (the Repeated eigenvalues case). Trajectories curve, tangent to the eigenvector direction near origin.
- : unstable improper node.
- : stable improper node (asymptotically stable).
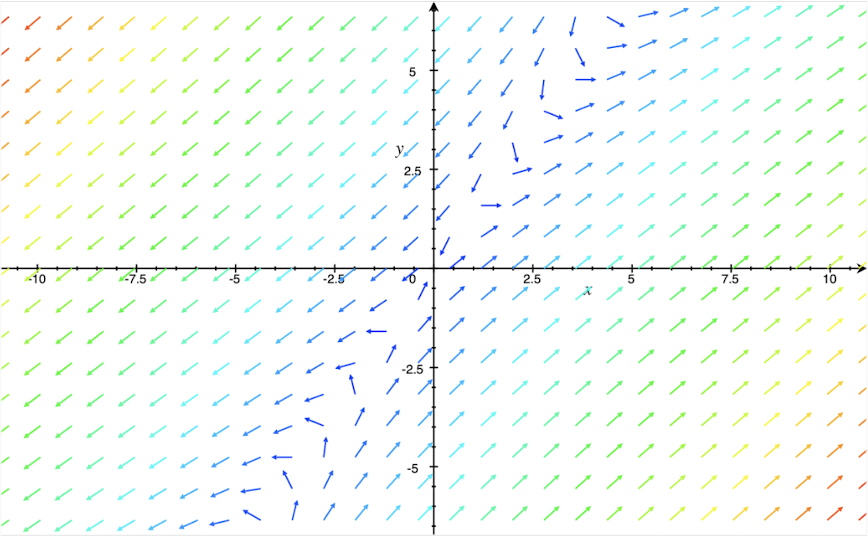
Case 5: complex conjugate eigenvalues with nonzero real part (, )
The system has oscillatory behavior with exponential envelope.
In polar coordinates , the radius evolves as , so exponential growth or decay. The angle changes at rate .
- : trajectories spiral outward. Unstable spiral.
- : trajectories spiral inward to origin. Asymptotically stable spiral.
The direction of rotation depends on the sign of .
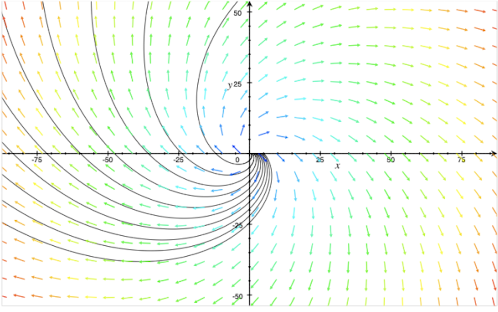
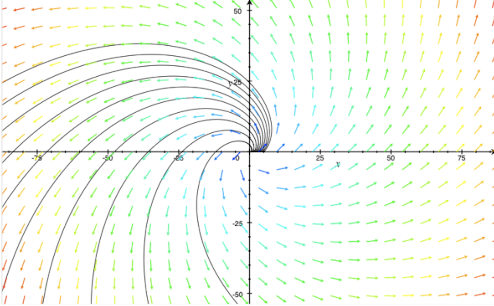
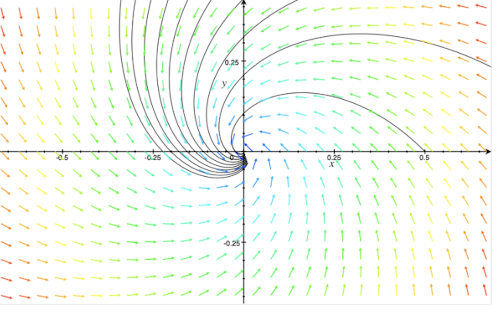
The four spiral images show: (unstable counterclockwise); (unstable clockwise); (stable clockwise); (stable counterclockwise).
Case 6: pure imaginary eigenvalues (, )
No exponential envelope (). Trajectories are closed orbits (ellipses around the origin), with period .
- Type: center.
- Behavior: bounded periodic motion forever.
- Equilibrium stability: stable but not asymptotically stable.
Summary table
| Eigenvalues | Type | Stability |
|---|---|---|
| Real distinct, both | Node | Unstable |
| Real distinct, both | Node (sink) | Asymptotically stable |
| Real distinct, opposite signs | Saddle | Unstable |
| Real repeated, 2 eigenvectors | Proper node | Stable iff |
| Real repeated, 1 eigenvector | Improper node | Stable iff |
| Complex, | Spiral | Unstable |
| Complex, | Spiral | Asymptotically stable |
| Pure imaginary | Center | Stable, not asymptotically |
Why this classification matters
For 2D linear autonomous systems, the eigenvalues of tell you everything about long-term behavior, no need to solve the ODE. Each phase portrait shape goes with a different qualitative behavior, and the eigenvalues alone pick which one.
It also carries over to nonlinear systems. By the linearization theorem, near any equilibrium of a nonlinear system the local phase portrait resembles one of these six cases (when the eigenvalues are off the imaginary axis). See Locally linear system for that technique.