An autonomous system of ODEs is one whose right-hand side doesn’t depend explicitly on the independent variable :
(no in ).
The system’s behavior depends only on its current state , not on what time it is. Same state same future evolution, regardless of when you start.
Why autonomous matters
Most physical systems are autonomous when there’s no time-varying external input. The laws of physics don’t care what year it is; only the current configuration of the system matters.
Examples:
- Pendulum (no driving): . Convert to first-order system :
No on the right, so autonomous.
-
Harmonic oscillator (no driving): . Same idea.
-
Predator-prey (Lotka-Volterra): . Autonomous.
A driven system is non-autonomous because appears explicitly in the forcing term.
Phase plane
For 2D autonomous systems, the parametric trajectory traces a curve in the phase plane (the -plane). The shape of this curve doesn’t depend on the speed at which it’s traversed, only on the relationship between and .
Eliminating via the chain rule:
This is the phase plane equation. Solving it gives the trajectories’ shapes (without the time parameterization).
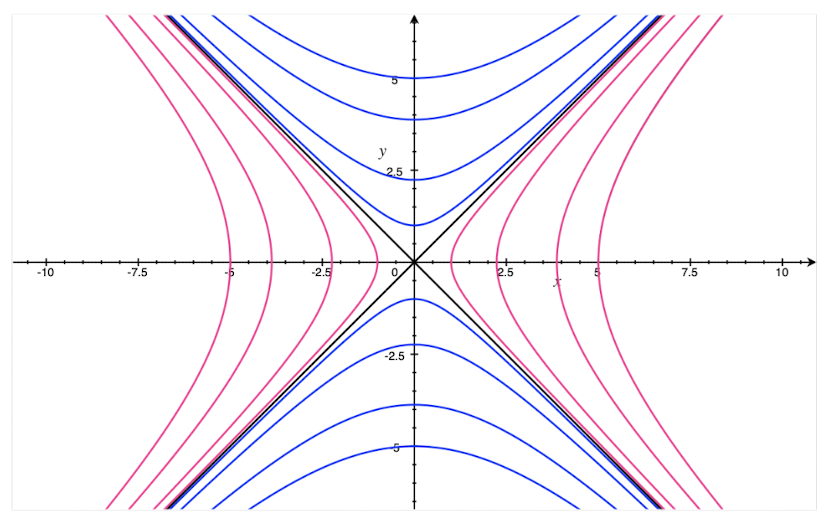
For example, has phase plane equation . Separable: , integrating gives , or . Trajectories are hyperbolas.
Equilibria
An equilibrium of an autonomous system is a state where — the rate of change is zero. Once at equilibrium, the system stays there.
Equilibria are also called critical points or fixed points. The phase plane equation is undefined at equilibria (both numerator and denominator are zero), so they appear as singular points in the phase portrait.
For a linear system , the origin is always an equilibrium (since ). If , the origin is the only equilibrium.
For nonlinear systems, equilibria can be anywhere; find them by solving .
Why we care about equilibria
The long-term behavior of trajectories is dictated by which equilibria they approach (or avoid). Stable equilibria attract nearby trajectories; unstable ones repel. Mapping out equilibria and their stability gives a qualitative picture of the system’s dynamics without explicit solutions.
For the stability classification, see Stability of autonomous systems and Phase plane behaviour.
Autonomous form is canonical
A common technique: any non-autonomous system can be made autonomous by introducing as an explicit state variable. Set , . Now the augmented system is autonomous in -dimensional state space.
This shows there’s no loss of generality in studying autonomous systems, but autonomous systems in their natural number of dimensions are usually easier to analyze.
For the linear special case, see Linear autonomous system.