A binary search tree (BST) is a Binary tree with an ordering invariant: for every node ,
- all values in ‘s left subtree are less than .
- all values in ‘s right subtree are greater than .
This invariant makes searching, insertion, and deletion all where is the tree’s height. For a balanced tree, — dramatically faster than scanning a list. For a degenerate (chain-like) tree, — no faster than a linked list. Hence the importance of self-balancing variants like AVL trees and red-black trees.
Searching a BST
To search for value :
- Start at the root.
- If equals the current node, return found.
- If is less, descend to the left subtree.
- If is greater, descend to the right subtree.
- If you hit
NULL, isn’t in the tree.
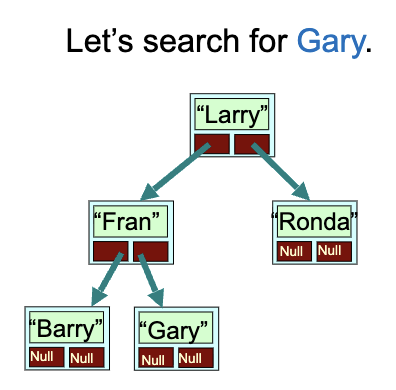
In the example, searching for “Gary”: start at “Larry” (Gary < Larry, go left), then “Fran” (Gary > Fran, go right), then “Gary” — found.
Iterative version:
int search(node *root, int V) {
node *ptr = root;
while (ptr != NULL) {
if (V == ptr->data) return 1;
else if (V < ptr->data) ptr = ptr->left;
else ptr = ptr->right;
}
return 0;
}Recursive version:
int search(node *ptr, int V) {
if (ptr == NULL) return 0;
if (V == ptr->data) return 1;
if (V < ptr->data) return search(ptr->left, V);
else return search(ptr->right, V);
}The recursive version is cleaner to read; the iterative one is slightly faster (no function-call overhead).
Big O of BST search
At each step you eliminate roughly half the remaining tree. With nodes, after steps you’ve narrowed down to . Set this to 1: , so .
So search is when the tree is balanced. Caveat: if the BST is a chain (built by inserting already-sorted data), search degenerates to .
Inserting
To preserve the BST invariant, the new value goes wherever the search for it would have ended (at a NULL slot):
If tree is empty:
Allocate a new node, set as root.
Otherwise, start at root. While not done:
If V equals current node: done (already in tree).
If V < current node:
If left child exists, descend left.
Else, allocate new node and set as left child.
If V > current node:
If right child exists, descend right.
Else, allocate new node and set as right child.
Iterative:
void Insert(BinaryTreeNode **node, int V) {
BinaryTreeNode *temp = newNode(V);
if (*node == NULL) {
*node = temp;
return;
}
BinaryTreeNode *current = *node;
while (current != NULL) {
if (V > current->data) {
if (current->right == NULL) { current->right = temp; return; }
current = current->right;
} else if (V < current->data) {
if (current->left == NULL) { current->left = temp; return; }
current = current->left;
} else {
return; // value already present, do nothing
}
}
}Insertion is for balanced trees, for degenerate ones — same as search.
Deleting
Three cases based on the target node’s children.
Case 1: target is a leaf
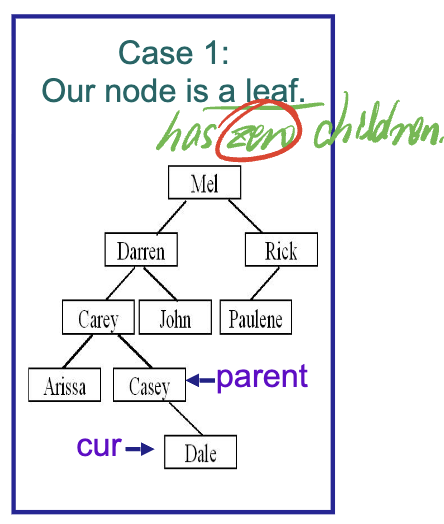
Just unlink it from its parent (set parent’s pointer to NULL) and free the node. If the target is the root, set root to NULL.
Case 2: target has one child
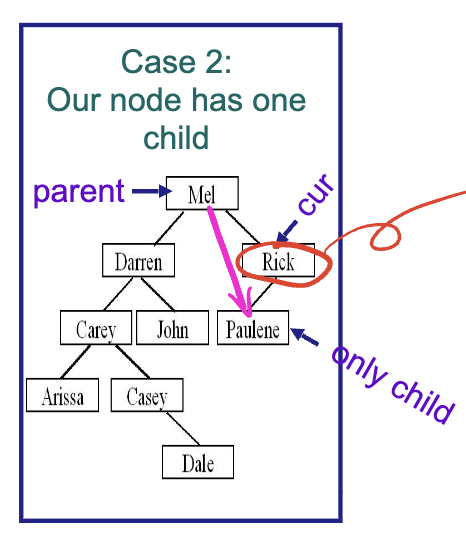
Splice the child up to take the target’s place — point the parent at the target’s only child, then free the target. If the target is the root, the only child becomes the new root.
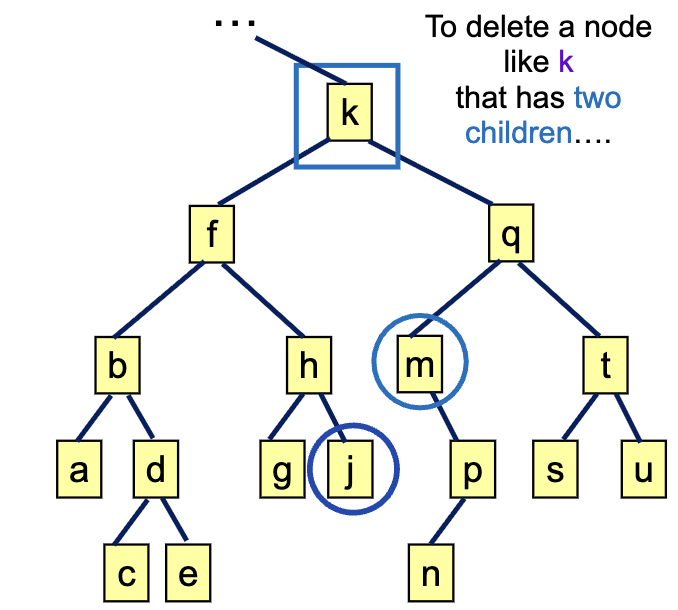
Case 3: target has two children
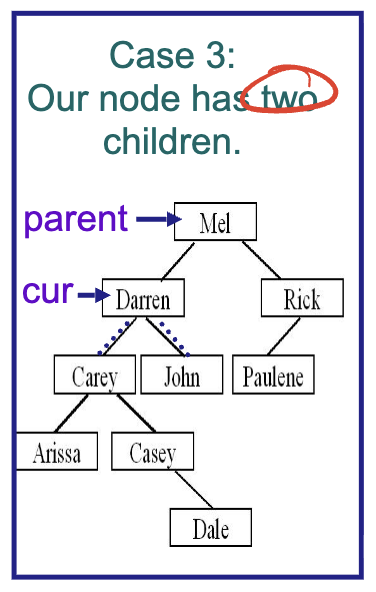
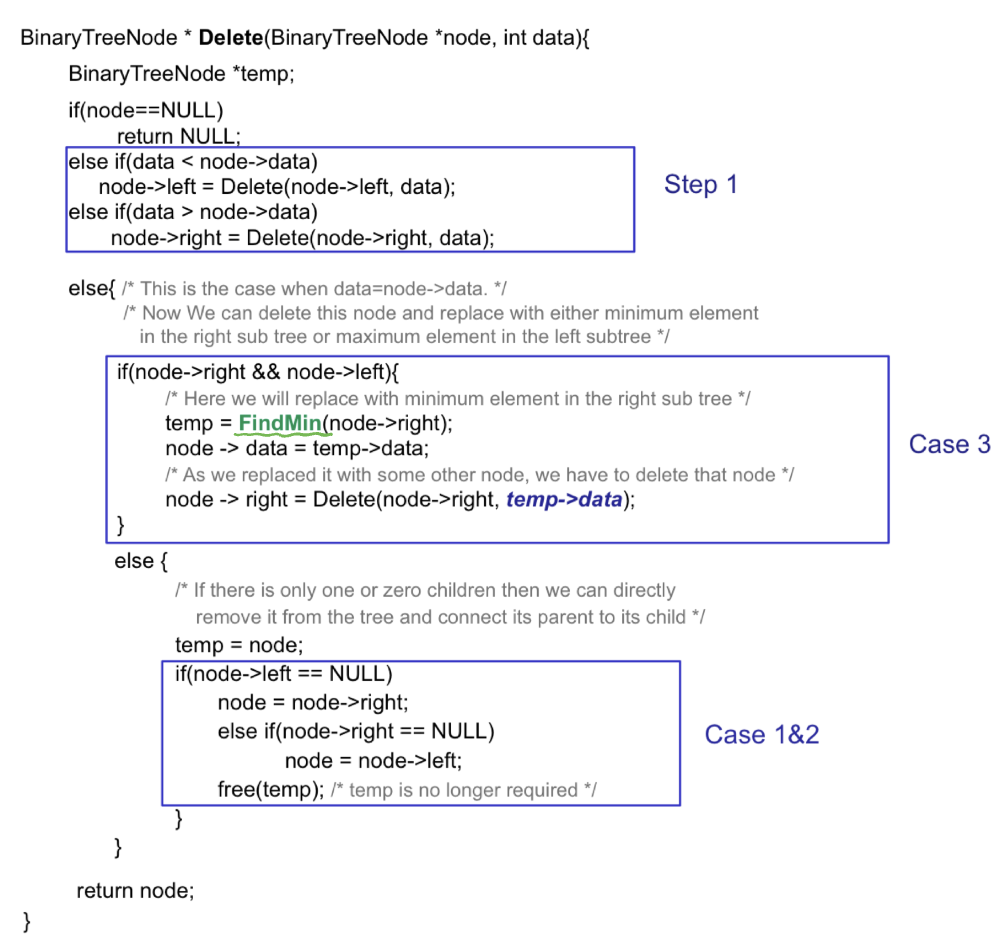
Trickiest case. Replace the target’s value with its in-order successor (smallest value in its right subtree) or in-order predecessor (largest in its left subtree). Then delete the successor/predecessor from its original position — by construction it has at most one child, falling into Case 1 or 2.
The in-order successor of a node with two children can’t have a left child (otherwise that left child would be smaller, hence the successor). Same logic for the predecessor and right child. So the recursive deletion is well-defined.
BinaryTreeNode *Delete(BinaryTreeNode *node, int data) {
if (node == NULL) return NULL;
if (data < node->data) {
node->left = Delete(node->left, data);
} else if (data > node->data) {
node->right = Delete(node->right, data);
} else {
// found the node; handle three cases
// ...
}
return node;
}The recursive form rebuilds the tree by returning the (possibly modified) subtree from each call.
Finding min and max
The minimum value is the leftmost node — keep going left until there’s no left child:
BinaryTreeNode *FindMin(BinaryTreeNode *node) {
if (node == NULL) return NULL;
if (node->left != NULL) return FindMin(node->left);
return node;
}The maximum is the rightmost — keep going right.
When BSTs go wrong
The big problem with plain BSTs: insertion order matters. Inserting 1, 2, 3, 4, 5 in order gives a right-skewed chain (every insertion goes right of the current node). The tree degenerates to height , so operations become instead of .
Two solutions:
- Insert in randomized order — works on average but not guaranteed.
- Self-balancing trees: AVL tree, Red-black tree. These maintain a balance invariant during inserts and deletes, guaranteeing regardless of input order.
This is why “real” BSTs in production code are always one of the balanced variants.
For the in-order traversal that produces sorted output from a BST, see Binary tree traversal.