A hash table stores key-value pairs and supports very fast lookup, insertion, and deletion — typically on average. It implements the map (associative array, dictionary) abstract data type: given a key, retrieve the associated value.
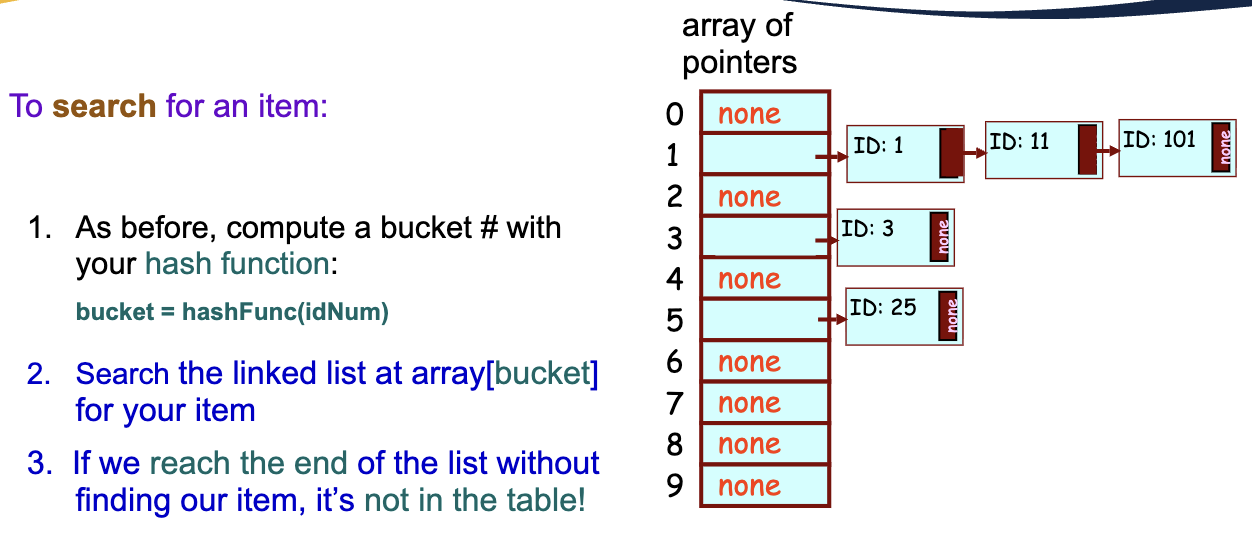
The trick: a hash function converts each key into an array index (a “bucket”). To look up a value, you hash the key, jump to that bucket. No traversal needed.
The catch: the bucket might already be occupied by a different key — a collision. Every hash table design is really just a strategy for handling collisions.
Map operations
The standard interface:
get(key)— return the value associated with the key, or NULL.put(key, value)— insert a new entry, or replace the value if the key already exists.remove(key)— delete the entry for the key (or do nothing if absent).size(),isEmpty()— state queries.
Hash function
A hash function h takes a key and returns an integer in [0, M-1] where M is the table size. Simple example for integer keys:
For string keys, you’d combine the bytes somehow — sum them, multiply by primes, XOR them together. Real hash functions are more sophisticated (FNV, MurmurHash, SipHash) and try to spread keys uniformly across buckets.
int hashFunc(int idNum) {
int ARRAY_SIZE = 100000;
int bucket = idNum % ARRAY_SIZE;
return bucket;
}The name “hash” comes from the fact that the function “chops up and mixes” the key — like hashing meat into smaller pieces — to produce an index.
Collisions
When two different keys hash to the same bucket, that’s a collision. The pigeonhole principle guarantees collisions are inevitable for any non-trivial hash table — there are infinitely many possible keys but only buckets.
Two main strategies for handling collisions: closed hash tables (open addressing) and open hash tables (separate chaining).
Closed hash table (open addressing)
When a collision occurs, look for the next available bucket along a fixed probe sequence and store there. Three textbook schemes, each with its own atomic note:
- Linear probing — step . Simplest, best cache behaviour, suffers primary clustering.
- Quadratic probing — step . Eliminates primary clustering; secondary clustering remains.
- Double hashing — step depends on a second hash . Best probe count, closely approximates ideal uniform hashing; worst cache behaviour.
Probe-count summary
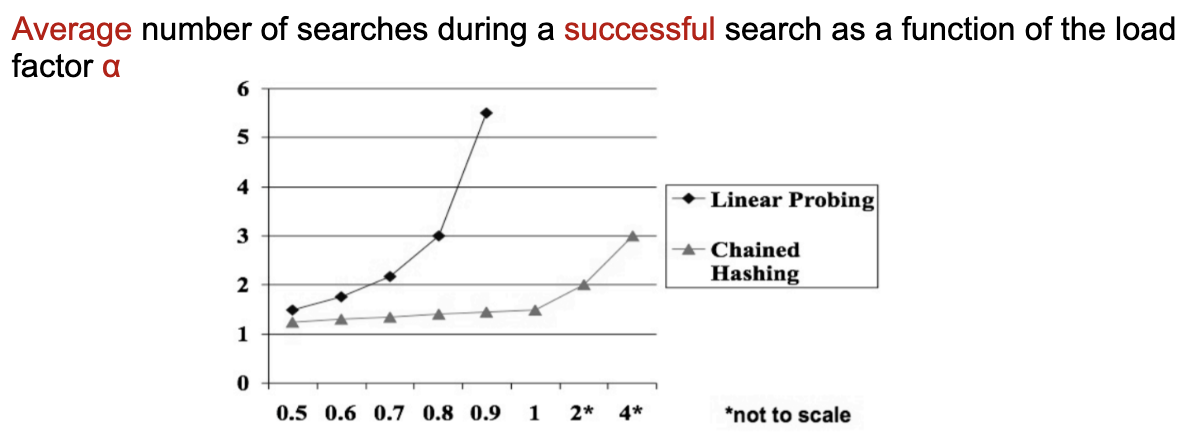
Define load factor where is items, is buckets. The four scheme behaviours at a glance:
| Scheme | Unsuccessful (avg probes) | Successful (avg probes) |
|---|---|---|
| Uniform hashing (ideal) | ||
| Double hashing | ≈ uniform | ≈ uniform |
| Quadratic probing | between uniform and linear | between |
| Linear probing |
The contrast is dramatic at high load. At , uniform predicts ~10 probes for unsuccessful search; linear predicts ~50.5. So closed tables typically resize at (textbook linear) to (Robin Hood / SwissTable).
Deletion needs tombstones
For all open-addressing schemes, naively setting a deleted slot to NULL breaks the probe chain. The fix is a tombstone: a sentinel value lookups skip over but inserts may reuse. See Linear probing for the worked picture.
Pros (open-addressing in general): fixed-size storage, no per-entry pointers, good cache behaviour. Cons: needs spare capacity; performance degrades sharply as .
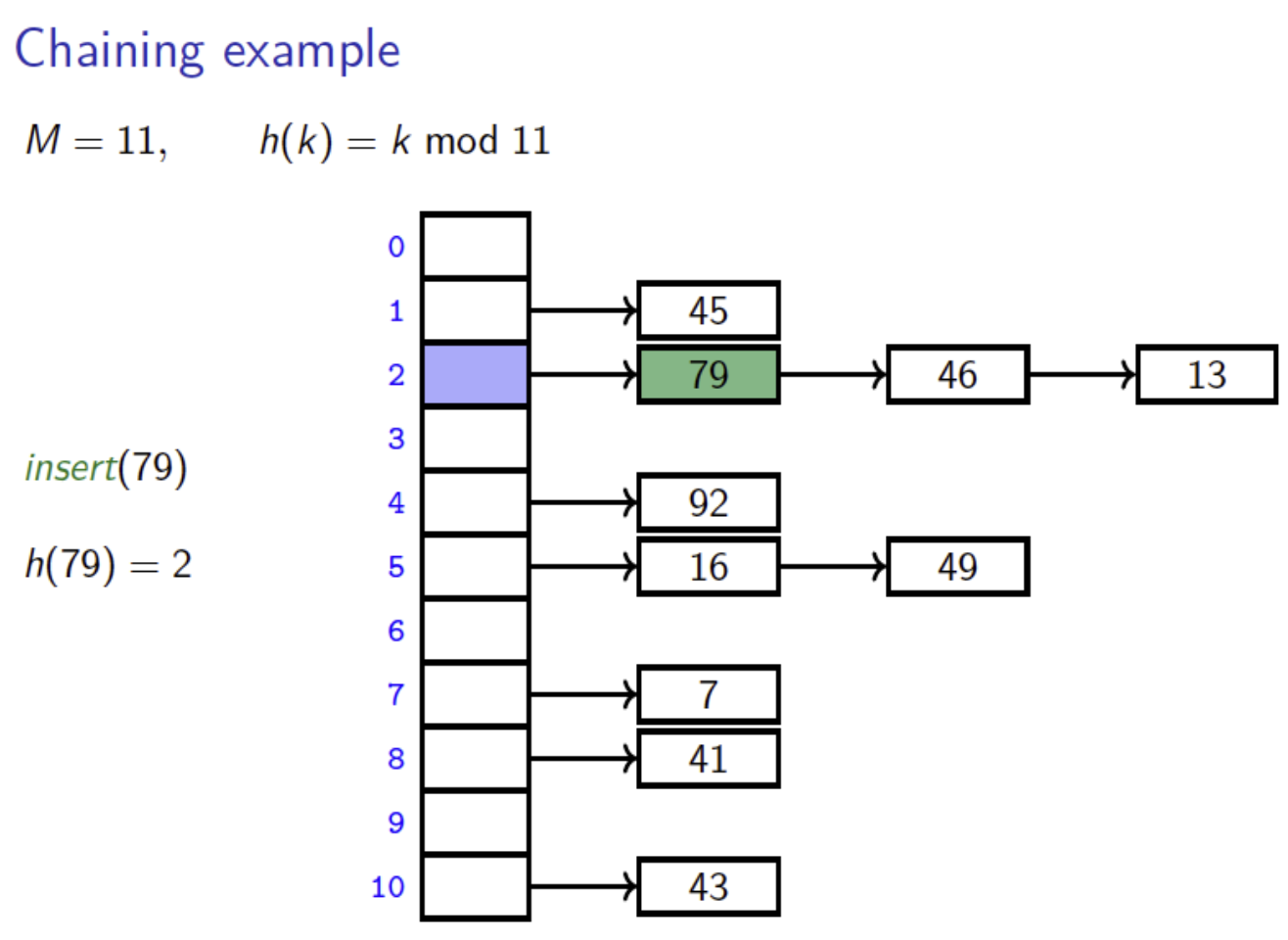
Open hash table (separate chaining)
Each bucket holds a Linked list (or another data structure) of all keys hashing to that bucket — see Separate chaining for the full treatment, including chain-as-tree variants and per-node memory overhead.
Quick analysis: average chain length , so unsuccessful search is and successful is . Worst case if every key collides — see hash flooding below.
Closed vs open
- Closed (open addressing): faster average case for moderate load, better cache. Resize before approaches 1.
- Open (chaining): handles dynamic load gracefully, simpler deletion, worse cache.
Modern languages mostly use open addressing for built-in hash maps: Python dict uses a perturbation-based probe, Rust’s std::collections::HashMap uses Google’s SwissTable design, and Go’s map uses bucketed open addressing (each bucket holds 8 slots searched linearly).
Worst case: O(n)
If many keys collide, both schemes degrade. In the worst case (every key hashes to one bucket), search is .
With a good hash function on a typical workload, this worst case is rare in expectation. But adversarial workloads do happen, especially on the public-facing internet, where an attacker can craft requests with deliberately colliding keys.
Hash flooding
If a server uses a deterministic, public hash function for an attacker-controllable input (HTTP query parameters, JSON keys, form fields), the attacker can pick keys that all collide. Every insertion then walks the full chain, turning the supposedly map operation into , which compounds across insertions to wall-clock work for a single request. This is hash flooding.
The first widely-publicized hits were demonstrated against PHP, Java, Python, Ruby, Node.js, and others around 2011 (CVE-2011-4815 and related). A single ~2 MB POST body with crafted keys could pin a CPU for many seconds.
The defense is keyed hashing: hash with a per-process random seed (SipHash with a secret key, for example) so an attacker cannot predict which keys collide. Modern language runtimes — Python, Ruby, Rust’s default HashMap, Go’s map, Perl — all do this. Older systems and ad-hoc hash maps written by programmers who only read the average-case analysis are still vulnerable.
So hash tables aren’t unconditionally safer than BSTs: a BST has bad worst-case shape on sorted insertion (an accidental attacker), while a hash table has bad worst-case shape on adversarially chosen keys (an intentional attacker). Both deserve mitigation in production code.