A system is BIBO stable (bounded-input, bounded-output) if every bounded input produces a bounded output. “Bounded” means stays between some finite bounds: the input never goes off to infinity, and neither does the output.
Formally: a system is BIBO stable if, for every input satisfying for some finite and all , the output satisfies for some finite and all .
Why it matters
Real systems have to behave reasonably for reasonable inputs. An audio amplifier whose output goes to infinity for a finite-amplitude input is unusable. A control system whose output blows up for a bounded reference signal is dangerous. BIBO stability is a practical requirement, not a mathematical curiosity.
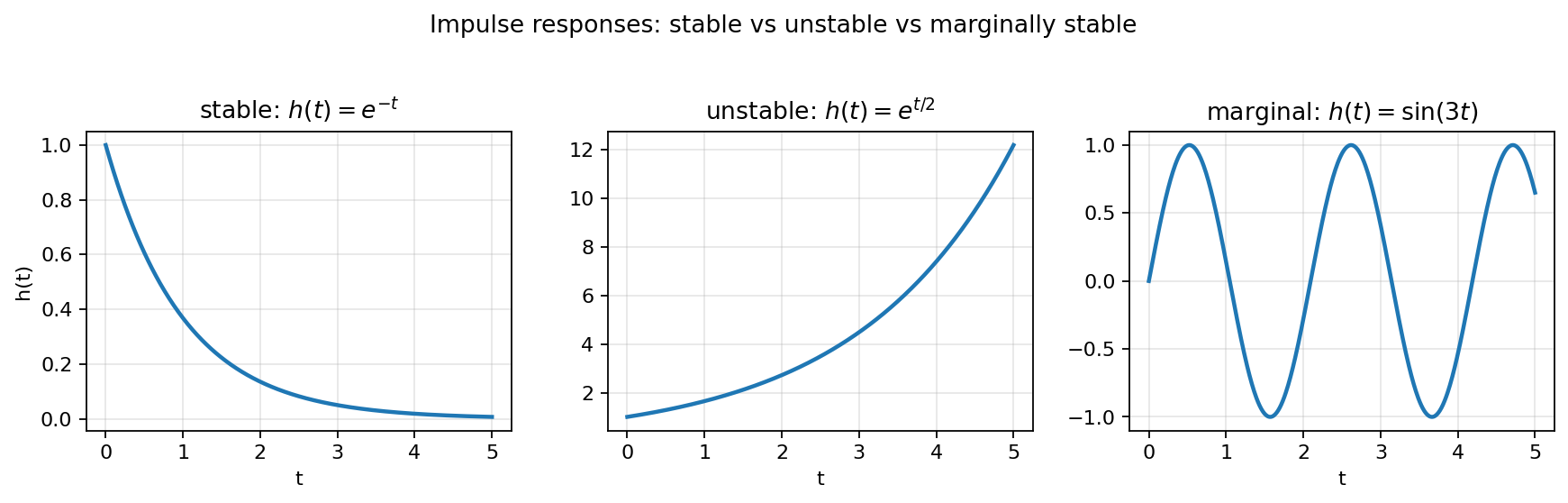 Stable, unstable, and marginally stable impulse responses. BIBO stability requires to be absolutely integrable.
Stable, unstable, and marginally stable impulse responses. BIBO stability requires to be absolutely integrable.
Test from the impulse response
For an LTI system, BIBO stability has a clean criterion:
The impulse response must be absolutely integrable.
Proof sketch. If for all , then from the convolution integral
If the integral on the right is finite, is bounded for every . The converse (BIBO stability ⇒ absolute integrability) takes a more delicate argument.
Examples
- : , finite. Stable.
- (pure integrator): . Not stable. A constant (bounded) input gives a ramp output (unbounded), confirming this directly.
- : integral diverges. Not stable, pole in the right half-plane.
Pole-location criterion
For an LTI system described by a linear constant-coefficient ODE, the impulse response is a sum of exponentials (and possibly polynomial-times-exponentials, for repeated poles) of the form , where are the roots of the characteristic polynomial. The integral is finite iff every tail decays, iff every has strictly negative real part.
So BIBO stability ⟺ all poles of in the open left half-plane. This is the standard stability criterion used throughout control theory and filter design.
Marginal cases, simple poles on the imaginary axis, are not BIBO stable (the impulse response is a sustained sinusoid, not absolutely integrable), even though they don’t grow. They’re called marginally stable.
RC lowpass: stable
The RC lowpass has characteristic equation , giving on the negative real axis. For any positive and , the pole is in the open left half-plane, so the system is BIBO stable. Every real RC lowpass is stable; there’s no way to build an unstable one out of passive components.
Versus other system properties
BIBO stability says whether the system behaves sensibly in service. Causality says whether it can be implemented in real time. Memory says whether it has internal dynamics.