A spanning tree of a connected, undirected Graph is a tree (a connected, acyclic subgraph) that includes every vertex of .
Formally: given , a spanning tree is a subgraph where:
- — same vertex set.
- is connected.
- is acyclic.
Since a tree on vertices has exactly edges, a spanning tree has edges from the original graph.
Subgraph
A subgraph of is any graph where and . So uses some (or all) of ‘s vertices and some (or all) of its edges.
A spanning tree is a special kind of subgraph: it uses all the vertices, picks edges, and the result must be a tree.
Multiple spanning trees
Any graph has many possible spanning trees — different choices of which edges to include give different trees. The number can be huge: a complete graph on vertices has spanning trees (Cayley’s formula).
Minimum spanning tree (MST)
A minimum spanning tree is a spanning tree of minimum total weight:
The MST is the cheapest way to connect every vertex while still being a tree.
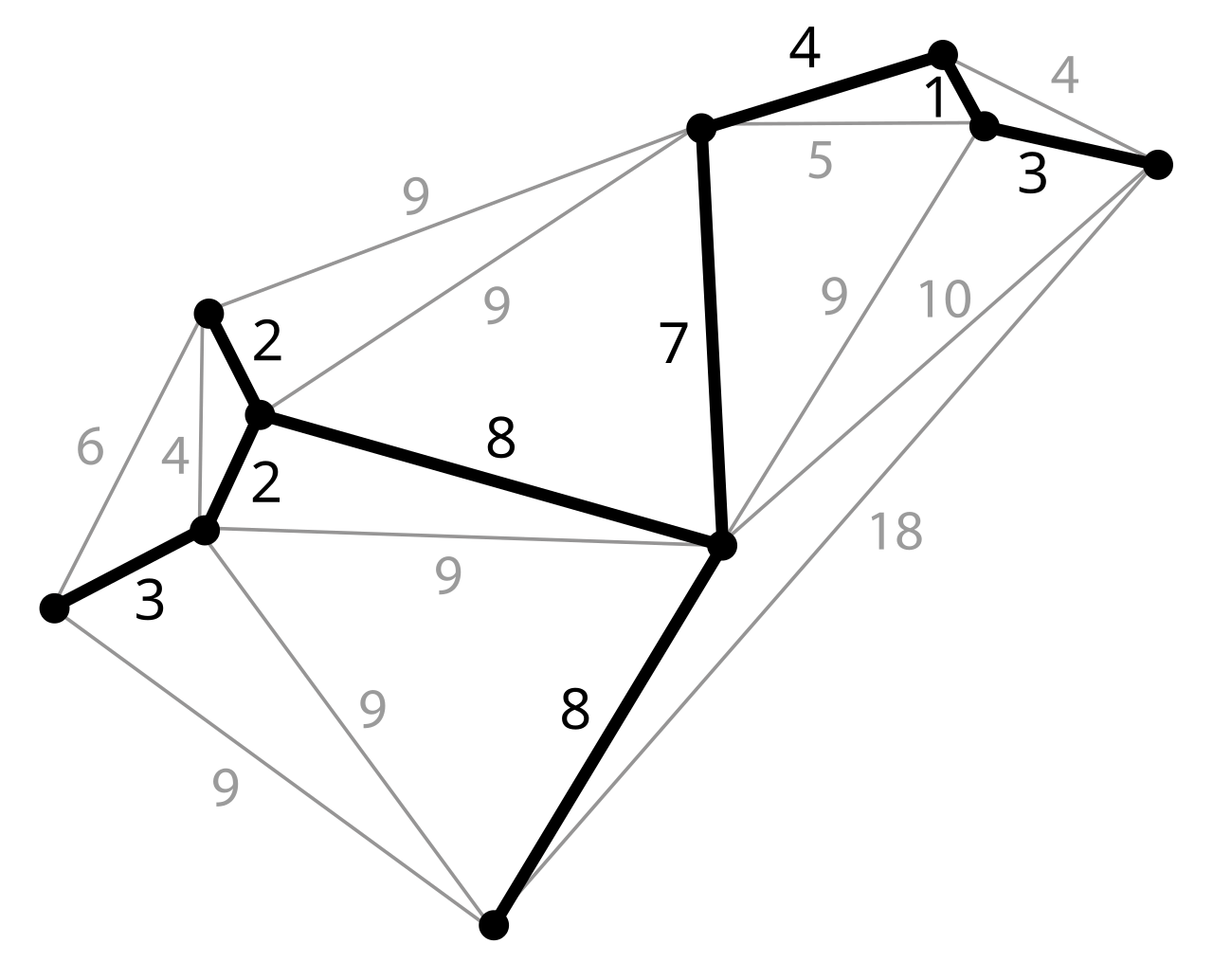 Image: Minimum spanning tree, public domain — each point is a vertex; the highlighted edges form the spanning tree of minimum total length.
Image: Minimum spanning tree, public domain — each point is a vertex; the highlighted edges form the spanning tree of minimum total length.
{kind=link}
Why we want MSTs
- Network design: connect a set of houses with cable, minimizing total cable used.
- Cluster analysis: in machine learning, MSTs are used to identify clusters.
- Approximation algorithms: MSTs underlie approximation algorithms for the Traveling Salesman Problem.
- Image segmentation: connect similar regions in an image with minimum-weight edges.
Algorithms for MST
Two classic algorithms:
- Prim’s algorithm: grow a tree from a starting vertex, always adding the cheapest edge that connects to a new vertex. Greedy.
- Kruskal’s algorithm: sort all edges by weight, add the cheapest that doesn’t create a cycle. Also greedy.
Both are correct. Prim is easier to implement on dense graphs (like Dijkstra); Kruskal is easier on sparse graphs (just sort edges). Kruskal runs in (the equality holds because , so ). Prim’s complexity depends on the priority queue: with a binary heap it’s , with a Fibonacci heap . For connected graphs , so — the two are asymptotically equivalent in that case. See Adjacency list for how the data structure choice interacts with the bound.
Spanning tree (without “minimum”)
Without the weight constraint, a spanning tree is just any tree covering all vertices. Algorithms like BFS and DFS each implicitly produce a spanning tree:
- BFS spanning tree: edges in the BFS forest, levels match BFS distance.
- DFS spanning tree: tree edges in the DFS traversal.
Both have edges and connect all reachable vertices.
For the standard greedy MST algorithm, see Prim’s algorithm. For graphs in general, see Graph.
Worked example
Consider a weighted undirected graph on six vertices A–F with edges AB(2), AC(3), BD(4), CD(1), CE(5), DF(6), EF(2) — the number in parentheses is each edge’s weight. Total weight of all edges: 23.
A spanning tree must include all 6 vertices and exactly 5 edges. Many possibilities; here’s the minimum one.
Apply Kruskal’s algorithm:
- Sort edges by weight: CD(1), AB(2), EF(2), AC(3), BD(4), CE(5), DF(6).
- Add cheapest edge that doesn’t form a cycle:
- CD(1) ✓ (no cycle yet).
- AB(2) ✓.
- EF(2) ✓.
- AC(3) ✓ (connects {A,B} component to {C,D}).
- BD(4) ✗ (creates cycle A-B-D-C-A).
- CE(5) ✓ (connects {A,B,C,D} to {E,F}).
- Stop: 5 edges chosen, all vertices connected.
MST: {AB, CD, EF, AC, CE}. Total weight: .
The same MST results from Prim’s starting at any vertex:
- Start at A. Cheapest edge from {A}: AB(2). Add B.
- Cheapest from {A,B}: AC(3). Add C.
- Cheapest from {A,B,C}: CD(1). Add D.
- Cheapest from {A,B,C,D}: CE(5). Add E.
- Cheapest from {A,B,C,D,E}: EF(2). Add F.
Same MST.
Properties
-
Cut property: for any partition (cut) of the vertices into two non-empty sets, the minimum-weight edge crossing the cut is in some MST. (This is what makes Kruskal’s and Prim’s correct — at each step they include such a crossing edge.)
-
Cycle property: in any cycle, the heaviest-weight edge is not in any MST. (You could always swap it for a lighter edge that still keeps the tree connected.)
-
Uniqueness: if all edge weights are distinct, the MST is unique. With ties, multiple MSTs may exist (all with the same total weight).
Counting spanning trees
For a complete graph (every pair of vertices connected), the number of spanning trees is
This is Cayley’s formula (1889). For : spanning trees. For : = 100 million.
For arbitrary graphs, the Matrix Tree Theorem gives a formula via the Laplacian matrix’s eigenvalues — but it’s mostly of theoretical interest. In practice, you compute one MST, not enumerate all spanning trees.
Variations
- Maximum spanning tree: opposite of minimum — find the costliest spanning tree. Same algorithms work with sign-flipped weights.
- Bottleneck spanning tree: minimize the maximum edge weight (rather than total weight). Different algorithm but related.
- Steiner tree: connect a subset of “required” vertices using any other vertices as helpers. NP-hard, doesn’t reduce to MST.
- Minimum spanning forest: for disconnected graphs, find an MST per component.
For the algorithms, see Prim’s algorithm. For graph fundamentals, see Graph.