A graph is a data structure representing a collection of objects and the relationships between them. Formally, a graph is a pair where:
- is a set of vertices (also called nodes).
- is a collection of edges, each connecting a pair of vertices.
Graphs are the most general non-linear structure; trees, lists, and grids are all special cases. Used for everything from social networks (people = vertices, friendships = edges) to road maps (intersections, roads), web pages (URLs, hyperlinks), and circuit topology.
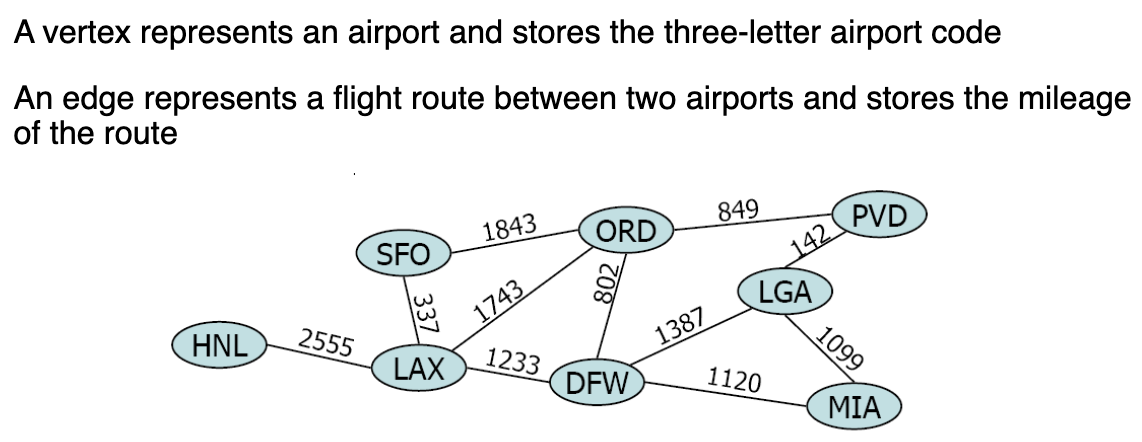
Example
Airports as a graph: each vertex stores a 3-letter airport code; each edge represents a flight route, possibly weighted with mileage.
Types
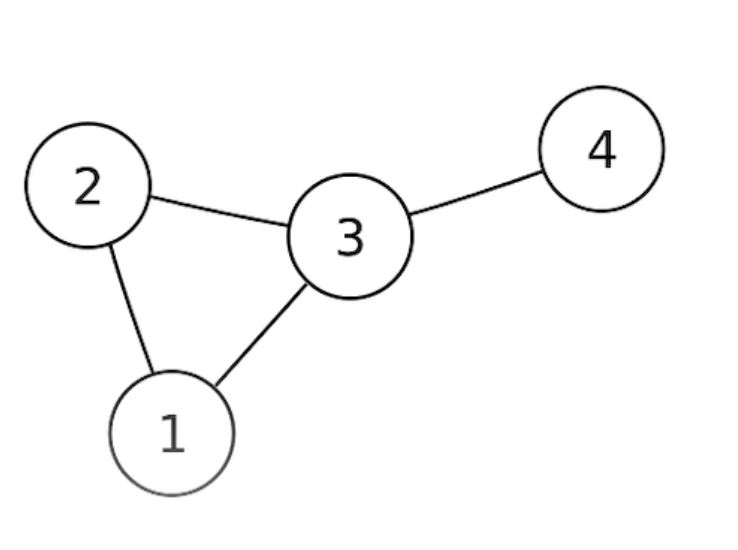
Undirected graphs
Edges have no direction — an edge between vertices and is just an unordered pair . If the graph has as an edge, you can traverse from 1 to 2 or 2 to 1.
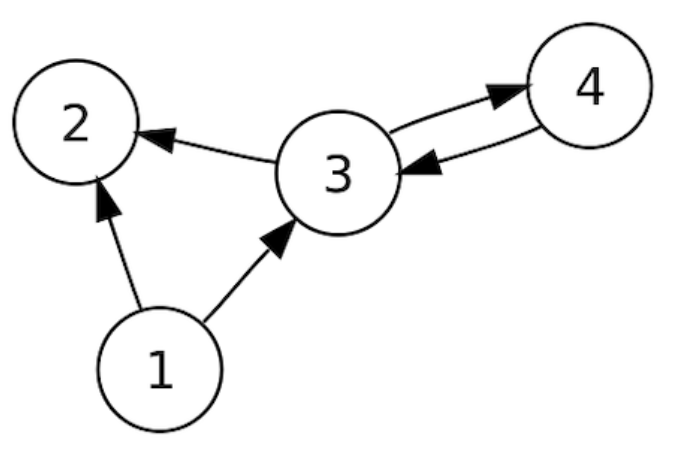
Directed graphs (digraphs)
Edges have direction — represented as ordered pairs where the edge goes from to . If the graph has as an edge, you can go 1 → 2 but not necessarily 2 → 1.
If both and are edges in a directed graph, you can travel either way.
Weighted graphs
Each edge has a numerical weight (cost, distance, capacity, time). Used for shortest-path problems, network flow, etc. See Dijkstra’s algorithm.
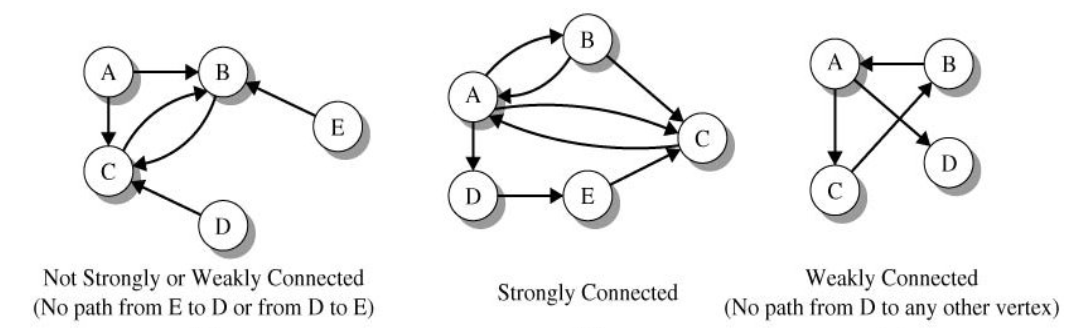
Connectivity
- Undirected graph is connected if there’s a path between every pair of vertices.
- Directed graph is strongly connected if there’s a directed path from every vertex to every other vertex.
- Directed graph is weakly connected if, ignoring edge directions, it’s connected (the underlying undirected graph is connected).
Representation
Two main ways to store a graph in memory:
- Adjacency matrix — a matrix with entries indicating edges. space, edge lookup. Best for dense graphs.
- Adjacency list — for each vertex, a list of its neighbors. space, edge lookup. Best for sparse graphs.
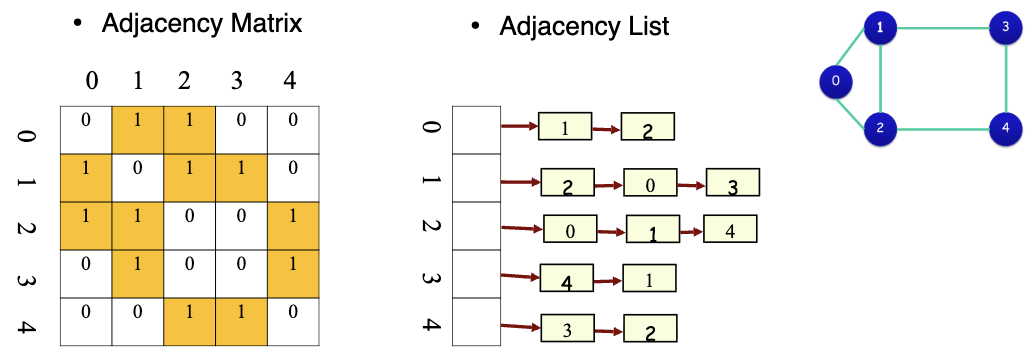
Most real-world graphs are sparse — social networks, road graphs, web graphs all have . So adjacency lists dominate practical use. The choice of representation affects algorithm complexity: BFS and DFS run in on a matrix but on a list.
Construction
void create_graph() {
int n, adj[100][100];
int count, max_edge, origin, destin;
printf("Enter number of vertices: ");
scanf("%d", &n);
max_edge = n * (n - 1);
for (count = 1; count <= max_edge; count++) {
printf("Enter edge %d (-1 -1 to quit): ", count);
scanf("%d %d", &origin, &destin);
if (origin == -1 && destin == -1) break;
if (origin >= n || destin >= n || origin < 0 || destin < 0) {
printf("Invalid edge!\n");
count--;
} else {
adj[origin][destin] = 1;
}
}
}This builds an adjacency matrix interactively. The matrix adj[i][j] = 1 indicates an edge from to .
Operations
- Traversal: visit every reachable vertex from a starting point. See Breadth-first search and Depth-first search.
- Shortest path: find the cheapest route between two vertices. See Dijkstra’s algorithm.
- Spanning tree: extract a tree that connects all vertices with minimum total edge weight. See Prim’s algorithm.
- Topological sort, strongly connected components, cycle detection — other graph-specific algorithms.