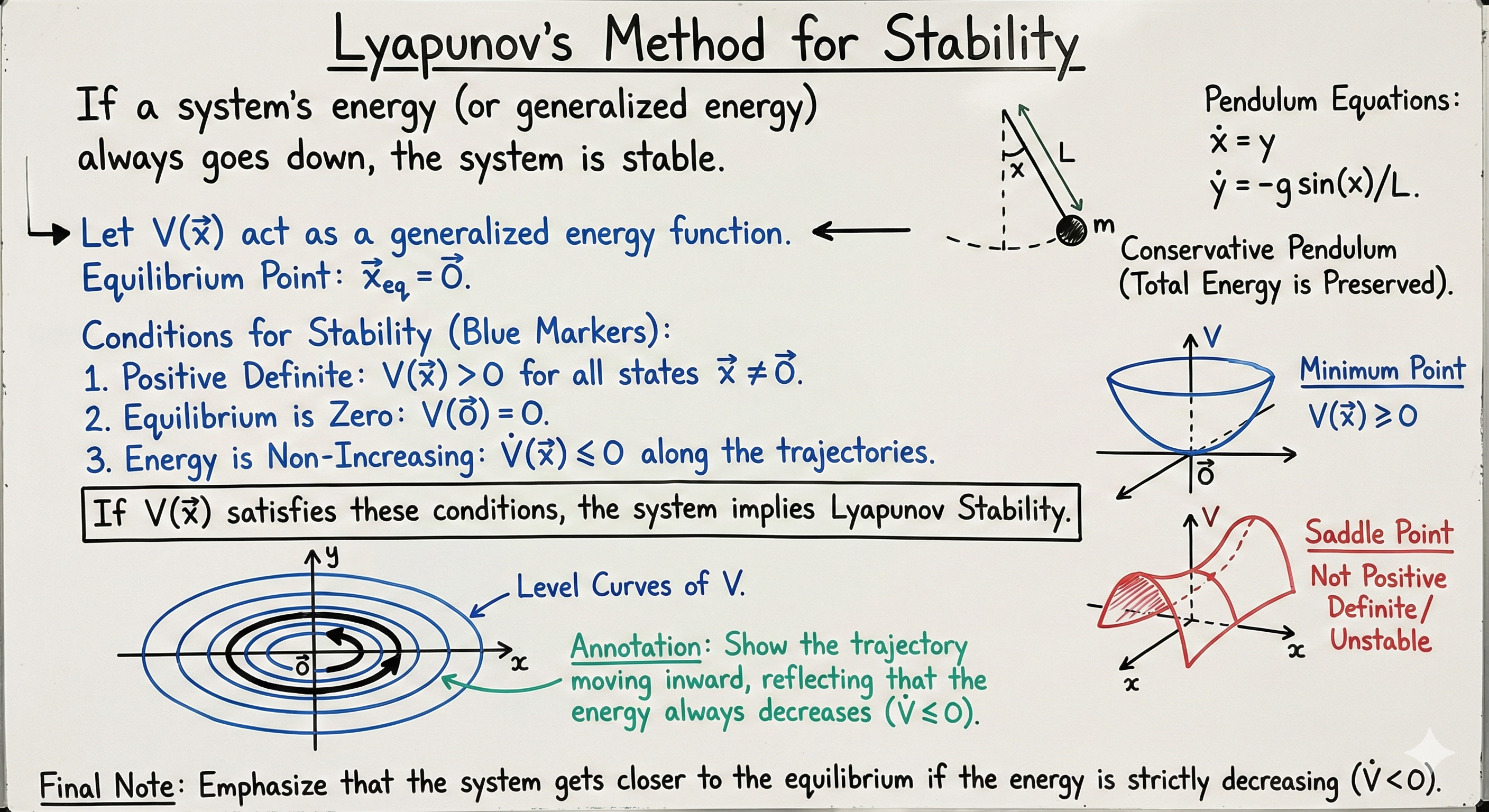
Lyapunov’s method determines stability of an equilibrium without solving the ODE. Find a scalar function that behaves like an energy and show it never increases along solution trajectories. If energy decreases, the system runs out of energy and settles down at the equilibrium.
It earns its keep when linearization fails (eigenvalues on the imaginary axis), where linear theory is inconclusive.
Conceptual basis
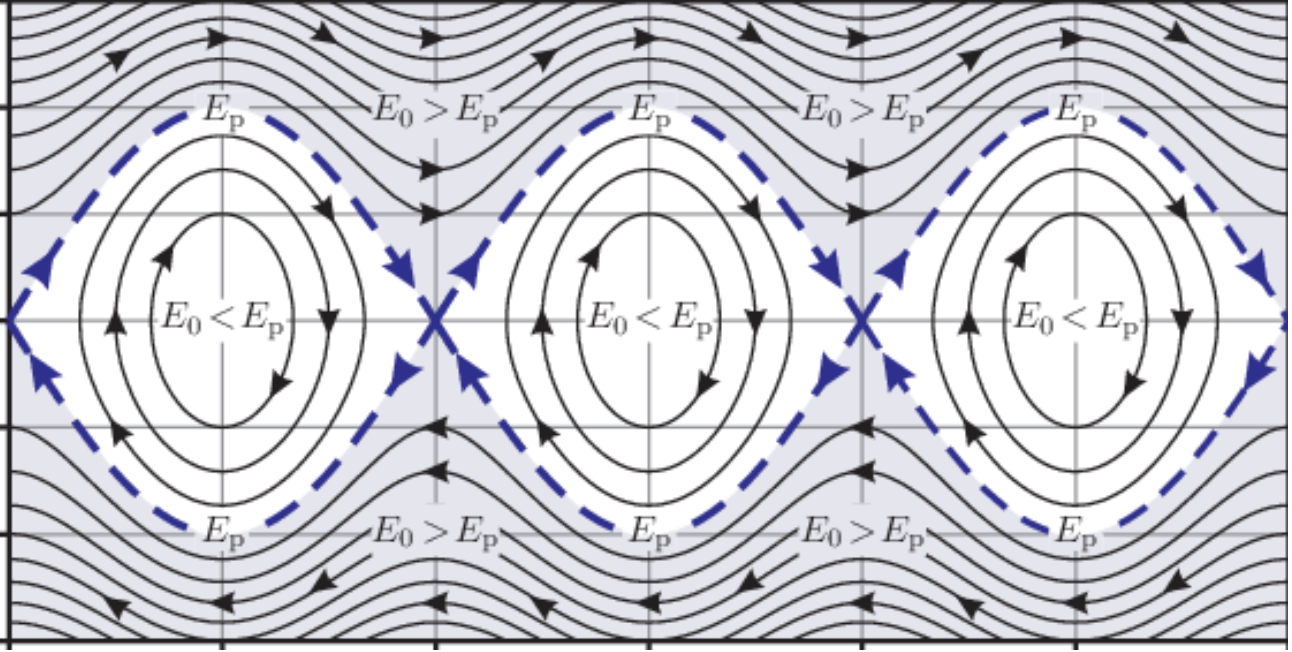
A conservative pendulum has its total energy preserved (no friction, no external forces). Solutions trace level curves of the energy function , closed orbits at constant energy. The equilibrium has minimum energy.
If the pendulum has friction, energy decreases over time. Solutions spiral inward through level curves toward the equilibrium of minimum energy. This is asymptotic stability.
Lyapunov realized: any function that has a minimum at the equilibrium and never increases along trajectories will play the same role as energy. The system “runs downhill” in until it reaches the minimum.
Definitions
A function defined on a neighborhood of the equilibrium is:
- Positive definite on if and for all .
- Positive semi-definite if and for all .
- Negative definite if is positive definite.
- Negative semi-definite if is positive semi-definite.
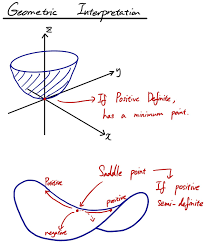
A typical positive-definite has a “bowl” shape with the bottom at :
The derivative along trajectories
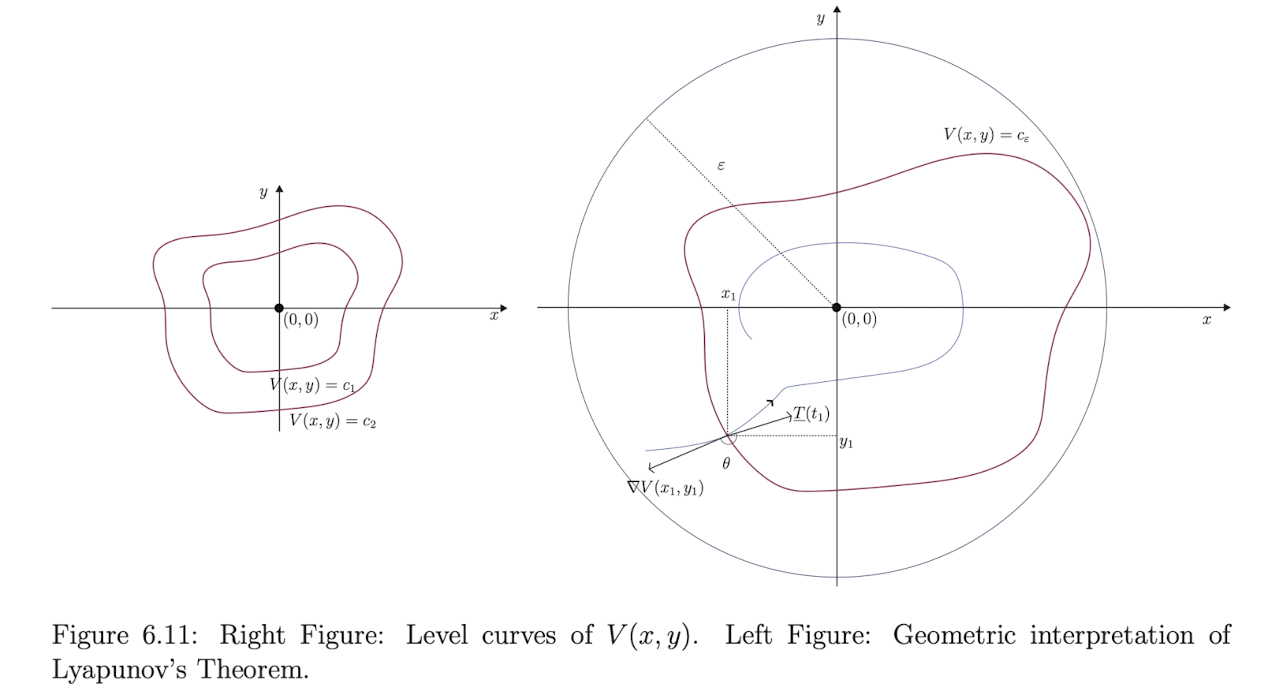
The quantity you want is the time derivative of along solutions:
You don’t need to know . Just take the gradient of and dot with . This is the rate of change of along whatever trajectory passes through .
If everywhere (except at the equilibrium), strictly decreases on every trajectory — the system runs downhill in , eventually reaching the bottom of the bowl.
Lyapunov stability theorem
Let be an isolated critical point of , and be defined on a neighborhood of with positive definite on . Then:
- If on , then is stable.
- If on , then is asymptotically stable.
Strict negative definiteness of implies asymptotic stability; semi-definite (allowing on some set) only gives stability.
Lyapunov instability theorem
Suppose and is defined on around the equilibrium. Then:
- If for every disk around there exists a point where and , then is unstable.
- If for every disk around there exists a point where and , then is also unstable.
Be careful with the exact hypotheses here. The standard Chetaev-style instability theorem wants the slightly stronger condition that the points have (strict) and on a region adjacent to the equilibrium; some formulations allow but tack on extra structure.
The instability versions are about finding some direction in which grows — that direction’s trajectory escapes the equilibrium.
Worked example
Consider:
Linearization at origin: Jacobian is the zero matrix (all first derivatives vanish at origin), so linear theory is useless.
Try a Lyapunov candidate: for constants .
- . ✓
- for when . ✓ (positive definite)
Compute :
For : substitute . Then .
Treat as quadratic in : . Discriminant:
For the quadratic in (which opens downward since coefficient of is ) to be always , we need its discriminant :
Since , we need , i.e., .
For this to hold for all in some neighborhood of : is small, so is small, so any works for sufficiently small neighborhood. Specifically, guarantees it on an open set around origin.
Conclusion: with (say), is positive definite and on a neighborhood of origin. By Lyapunov’s stability theorem, origin is asymptotically stable.
This is information linearization couldn’t provide.
Finding Lyapunov functions
There’s no general algorithm. Finding a Lyapunov function is sometimes an art. Strategies:
- For mechanical systems: try the total energy (kinetic + potential). Often works.
- Quadratic Lyapunov function: for some positive definite matrix . For linear systems, , and you can solve the Lyapunov equation for a chosen .
- Symmetric perturbations of energy: for nonlinear systems, modifications of the natural energy.
- Use trajectory information if you’ve simulated: should decrease along observed trajectories.
When the linear theory works, Stability of autonomous systems covers it.